計測システムは、8割方完成してますが、課題として以下が残ってます。
①M5StackとCPLTの相性が悪かった
BlueTooth経由でPCに接続する方法を検討してきました。しかし、今週、ArduinoIDEが使用不能になった件で、ノートPC3台ともOS新規インストールして、きれいにしたら、なんと、M5StackとのUSBシリアルの相性が治りました。CPLTとも普通に接続できるようになりました。USBシリアルドライバがおかしくなっていたのかもしれません。ESP32は、USBシリアル回りでマージンがあまりない設計になっているように感じます。USBシリアル回りでいろいろな不都合が発生しているようです。こちらに不具合列挙されていて感謝です。
https://www.mgo-tec.com/blog-entry-trouble-shooting-esp32-wroom.html
②クランクのM5StickCのバッテリー寿命が短いので、1000mhA以上のモバイルバッテリーで3-4時間程度しかもちませんので、1日中計測ができないという課題があります。モバイルバッテリーでなく、ラジコン用のリポ電池を交換しながら使う方法を検討します。ESP-NOWは、WiFi常時なので300mAくらい使っていると思います。
③左右クランクと上死点ユニットの3個のCPUが正常に動作しないと母艦がスタートできないプログラムになっているが、母艦で3個の監視をして正常かどうかを判定できるようにしないと計測開始で毎回手間取る。
④BlueToothでのスマホとの通信は、Processing Ketaiライブラリの速度制限があって、8msecではデータ抜けが発生するため、20-30msec周期までおとさないと安定しない。そのため、スマホを母艦として全データがログできない点が課題となっている、KETAIライブラリーの使い方が悪いのかもしれないので、後日、スマホBT通信の速度を再度検証する。
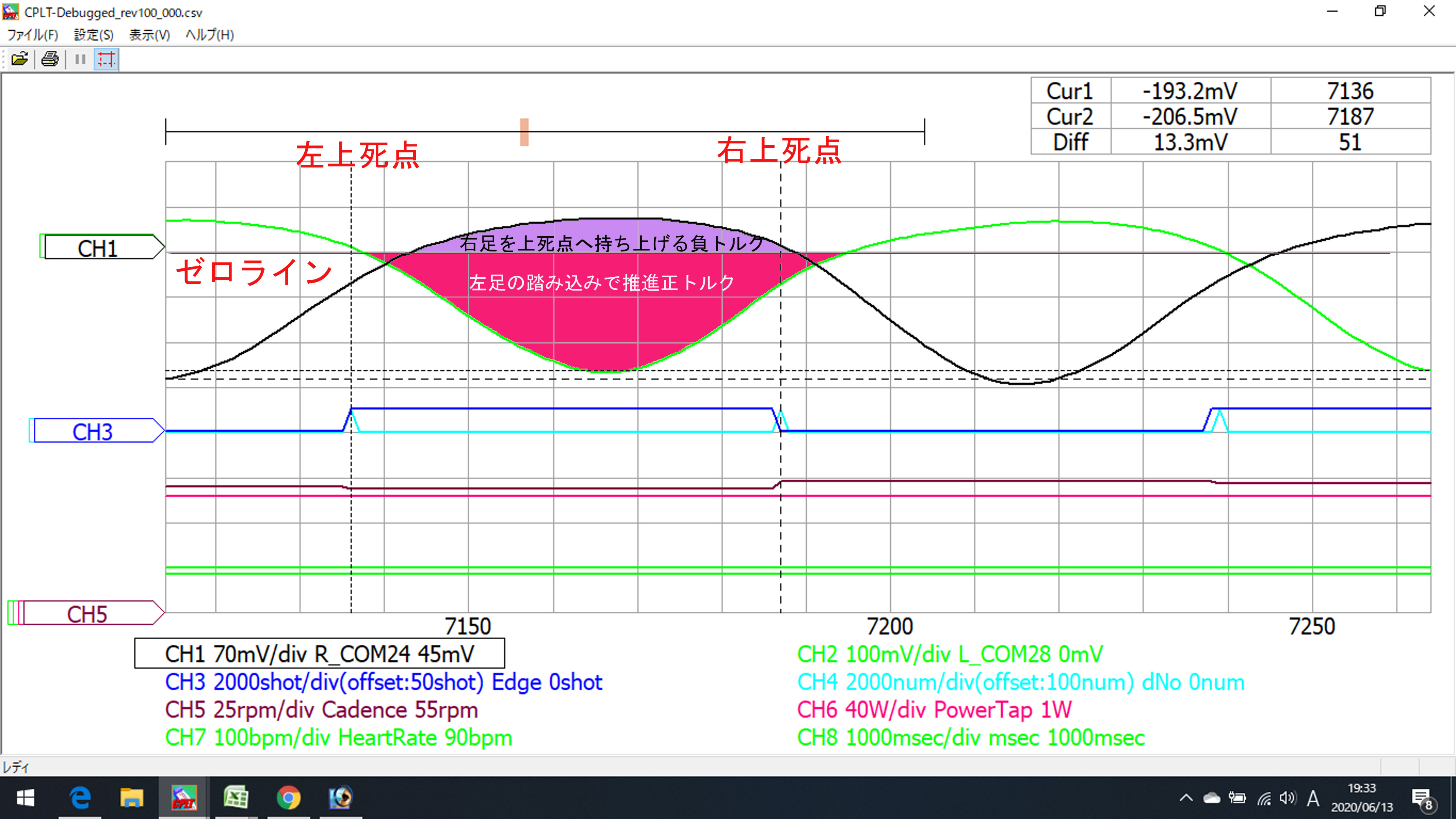
●CPLTでペダリングデータ眺めてみる
上死点信号の抜け対策済んで、ようやく、パワー計算段階になりました
黒:右トルク、緑:左トルク、青:上死点、ピンク:PowerTap(w)
紫:ケイデンス
ぱっと眺めてみるとパワータップ値で200Wくらい踏んでも、踏力トルクはあまり大きくなってなくて、その分ケイデンスを増やしてパワーを加速させていることがわかります。ケイデンスの微細な変化を測定することを検討します。

■左右のトルク波形のパワーが正負になる
片足を踏み込むとき、反対側の足を上死点まで運ぶための負のトルクがある点が注意です。これを極力減らすために引き足があります。
左右トルクを単純に足してはいけません。引き足側のマイナストルクは、ふみ足側の正トルクに含まれています。摩擦力のようなものですが、パワータップと比較する場合左右の正負トルクからどうやってパワー値を計算すればいいか検証をやっていきます。

■区間時間の精度が決めてになる
上死点の同期信号を左右クランクに送信しているが、母艦との遅れが
発生している。センサが認識した時刻とクランクが認識した時刻が
16msecずれている可能性がある。クランク単体で時間誤差を最小にして
パワー計算を完結させないと、母艦通信誤差がでてしまうので、パワー計算をクランクCPUで行うシステムにしないといけない。

上死点時刻測定誤差のパワー計算への影響は大きいです。
特に、パワー値が大きくなるほど時間誤差影響が大きくなるので
力計測誤差より時間計測誤差のほうがパワー計算では影響が大きいです。

18msecも誤差が発生するとそれだけ1-5%パワー誤差がでるので、クランク単体で、8msec以内で通信誤差をなくす形で計算しないといいけない
●以後
パワータップの遅延が2秒あるので、クランクとの比較が面倒なことなりますが、
とりあえずEXCEL上で計算してからプログラム化します。