ロードセル2個でノズル押出力とモーター反力が測定できることが確認できたので、フィラメントの搬送速度モニターするためにフィラメントをエンコーダでカウントする機構を作ります。
●フィラメントカウンタの必要性
フィラメントの実際の供給長さをカウントできれば、ノズル圧力と吐出 量がわかるので目詰まり気味かどうかの目詰まりパラメータを計算できるはずです。
目詰まり気味=>送り量減少とノズル圧力過大
正常吐出 =>送り量適正範囲内、ノズル圧力適正範囲内
正常と目詰まり気味を定量化することで、フィラメント種類による条件(温度、送り速度、ヘッド速度)
のバランスを最適化して、高速で、安定した造形が可能になるだろうという目論見です。
まだ、概念だけなので、フィラメントカウンタを作って実験値を積み重ねながら、実証していきます。
●機構作りの課題
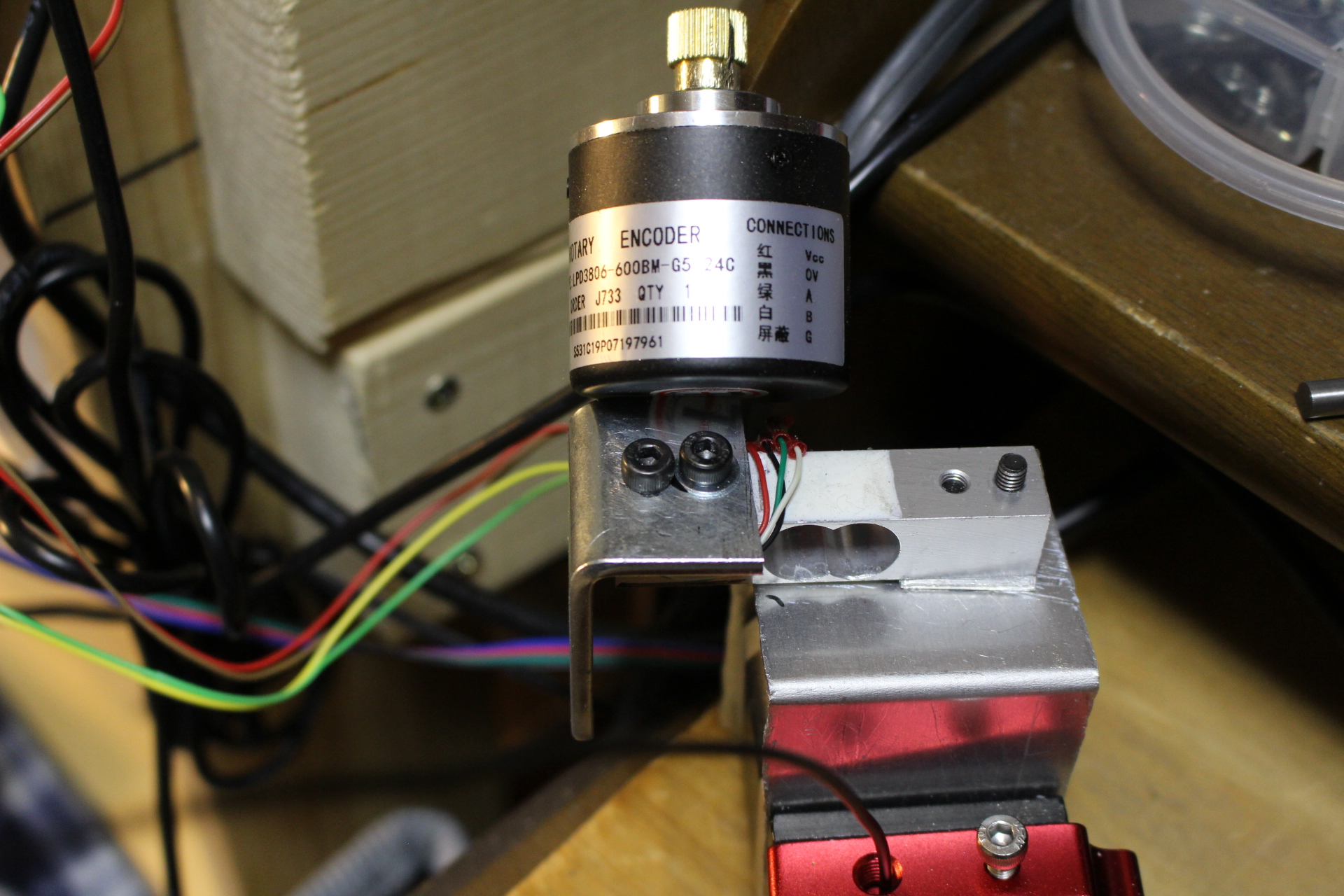
①エンコーダーの軸径はφ6で3DP プーリー類はφ5かφ4なので
径をあわせないといけないです。
φ5の孔を拡大するにもSUSギアだと削りにくいので
真鍮ギアでやすりでごしごし3時間かけて穴を拡げました。

➁エンコーダー負荷
カウントするために、フィラメントを挟んでエンコーダ軸を回転させるので、エンコーダーの回転摩擦等がフィラメントの送り負荷となるので、
モーターの送り抵抗となって、カウンタが無い場合よりフィラメントがスリップし易くなる課題があります。ですので、スリップが起きにくいように
できるだけエンコーダーによる送り負荷を小さくして、さらに管理しておかないといけません。幸い、送り出し力が500gf単位で2kg程度までと大きいのでエンコーダ負荷100gfあっても、全体に大きな影響はでないかと思います。
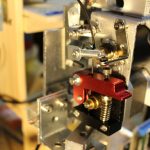
③押圧力プーリー機構
適当にフィラメントをギアに押し付ける押圧力が必要です。
力を微調整できる機構を作らないといけません。
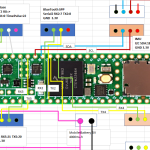
③マイコン処理課題
NucleoF446REは、AD7193をドライブするのに忙しい中
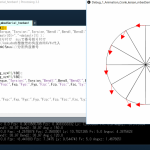
エンコーダにエッジをカウントしないといけません。600pprのエンコーダなので、相当周波数が高くなるので割り込みでμsec単位でカウントすることになるので、AD7193の動作が狂う可能性があります。何しろAD7193は、CH間でWAIT1msec入れないと動かないICですので、割り込みで数十μsec発生しただけでも誤動作するかもしれません。
最悪エンコーダー用マイコンを別途用意しないといけません。