2020年冬の電子工作は、GNSS-RTK技術を活用したスキーターンモニターを開発中です。
ここ4年IOTセンサをいじってきましたが、このRTK技術は、今までのセンシングとは、考え方が違います。新たなアイデアのネタとして非常に刺激的な技術だと感じてます。
RTKについては、下記リンクでどうぞ。
http://gnss.co.jp/wp-content/uploads/2016/07/ddd790b4eae745d43594c4f302b14761.pdf
の32ページにRTKの解説があります。

19ページにGNSS測位の誤差の表があります。

RTKLIBで有名は東京海洋大学の高須先生のHPは、詳細です。
http://gpspp.sakura.ne.jp/index.shtml
その中に計算方法のプレゼン資料がありました。
http://gpspp.sakura.ne.jp/paper2005/gps_tutorial1_tohokudai_revA.pdf
。
RTK法は、2個の受信機で同時比較して、ノイズを除去できる方法です。
コンセプト的にはオペアンプのコモンノイズ除去と同じコンセプトです。
●多分力センサ2020年以降のアイデア
5G時代になるので、センサで測定したリアルタイムデータをmsecオーダーでサーバーに送って大規模な計算させて結果を戻すことが可能になってきます。
センサ単体では解決できない課題があって、開発者は様々な計算手法(フィルタ、統計計算、回帰計算)をしているのですが、開発者がいちいちやるのではなくて、センサシステム内で自動的に随時計算手法を実行しながら最適解をだしてくれるセンサがこれからのセンサではないかと感じてます。
上記RTKは、本来なら外部のPCで大量の連立方程式を解く逆行列計算を高速に何回も繰り返しながら
最も精度が良い緯度経度の最適解を計算する方法です、以前は、外部のPCでやっていたのが、現在は、GNSSICチップ内で高速な計算アルゴリズムが内蔵されていて、チップだけでRTK計算結果が出力されるようになってます。
「これを多分力センサに当てはめると、各分力が混じったひずみゲージブリッジの出力に対して、外力ベクトルを加えて干渉補正計算して、得られた干渉補正係数をプログラム内に書き込んで、6軸力覚センサの出力精度を上げているのが現在の多分力センサの世界ですが、この作業をオンサイトでセンサシステムの中に組み込んでしまうことで、外力ベクトルが加わった瞬時に、干渉補正計算をやってその時の外力条件に最も最適な干渉補正を瞬時にやってしまう多分力センサシステム」
①この論文でやっている計算と作業をシステム内に埋め込んでしまおうというアイデアです。
https://doors.doshisha.ac.jp/duar/repository/ir/14292/?lang=0
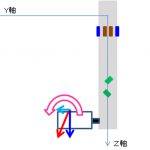
➁さらに、以前トライした3Dテンションプローブが使えそうです。
●メリット考察
メリット1:今までは、起歪体の精度、ゲージの精度、温度補償など様ざまな補正をメーカー側で、作業をしてから出荷していたので、多分力センサのコストの相当部分が、単品調整の時間と手間であったのが、そのまま出荷して、システムが随時最適化補正してくれるので、コストが下がる。
メリット2:我々のようなユーザーが自作する起歪体とゲージ精度はいい加減なものですが、干渉補正システムを同時稼働させることで、その場で最適な分力補正値を算出してくれるので、自作程度の多分力センサでも精度が向上できる
メリット3:わざわざセンサ起歪体を設置しなくても、測定したいBODYにひずみゲージを複数個所貼って、その入出力関係から干渉補正して、そのBODY自体を多分力センサ化できる可能性があります。例えばロボットハンドにセンサを埋め込むのではなくロボットハンドの構造部材にひずみゲージを貼りつけてセンサ化してしまうというアイデアです。このために
私は、3Dプリンタで作る6軸力覚センサの開発を試みたわけです。
●以後
新しい技術に触れる度に、アイデアを夢はどんどん拡がります。新たな技術を個人の電子工作から
生み出せる時代がきたと思ってます。皆さんもがんばってください。