近くに基準局があったので、静的精度は十分でたので、スキーターンが測定できるか、試しに家の前で2種類の旋回運動を測位してみました。
0:初めの調整
1:ロードバイクホイールでの半回転運動の測位
2:1m棒先端を手でもって八の字旋回運動の測位
●初めの調整
ホイールタイヤ部にアンテナを載せて半回転だけ手で回して軌跡をみながら最適条件をさがしました。
①精度より安定性重視の設定がよかったので、u-center-View-Messages view
UBX-CFG-DGNSSのDifferetial modeを
2,RTK float:No attempt are fix ambiguities に設定変更
今までは、3,RTK fixed : Ambiguities are fixed whennever possibleだと
常に精度計算しているので数十cm飛んでしまう場合があった。
3だと1-2cmだったが、2だと5cmくらいで安定していて
飛びが少ないので軌跡の形が得られました。

➁PCとF9Pの通信速度を230400bps、サンプリング200msec

デフォルトで32800bpsなので、それを230400bpsに
書き換えた。使っているボードがSimpleRTK2liteなので、uart1がUSBシリアルにつないでいるので、UBX-CFG-PRTでuart1 設定

●ホイールの回転の場合
少し傾いているので半回転は
①自由落下で回転させて測位と
➁手で早く回して測位
の2水準

①自由落下軌跡結果
自由落下で5回測定、下半分で静止しないで3-4回動く
半径31cmなので直径60cm前後の半円になるはずだが
大体60cm±10cmには入っている。

➁手で早く回した場合
200msecサンプルでは、まばらになってしまいます、さらにばらつきが10cmくらいでています、30cm半径で10cmでると目立ちます。小径は厳しいと判断します

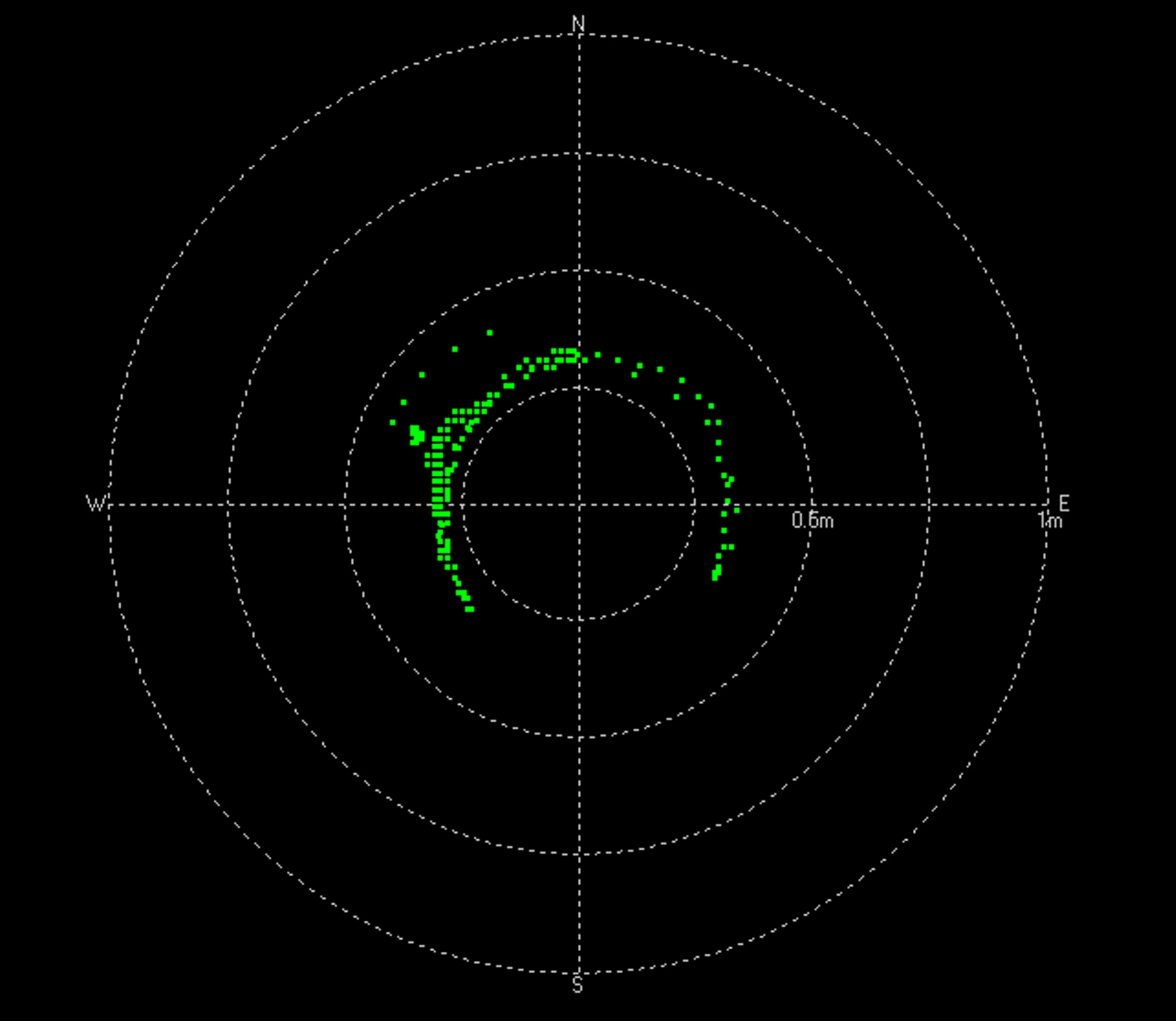
●棒につけて八の字に振り回す

手で降りまわすと半径1m-1.2mくらいの円弧の組み合わせに軌跡がでました。それらしき軌跡ですので、これを実際の動きとどうやって校正検証するか検討する価値はあります。

時速36km以上でてます、スキーの平均的な速度です。