この3カ月間、左右クランク角度の位相がずれて受信されてしまう現象の対策をしてきましたが、
10月末の実走行において、突然、左クランク波形で大きな位相ずれが発生しました。
●今までの対策
9月27日の記事で、
Xbee無線通信のデータ落ちが位相ずれの原因だったので、その対策をして治ったと思っていたのですが、今回発生した位相ズレは、データ落ちが皆無なのに発生している点で違ってます。
関係すると思われるパラメータのチェックを行っていきます。
●チェック表
| チェック項目 | 確認方法・検証 | 結果・考察 |
| ①通信でのデータ落ち | 左右マイコンで測定時点でのタイムスタンプをデータと同時に送信することでそのデータの取得時間をmsec単位で固定します、サンプリング間隔は10msecで固定してあるので、タイムスタンプ間隔が10msecになっているかでデータ落ちが分かるはずです。 | 10月31日走行データで、左右クランク、Seattubeともデータ落ち無かった。 |
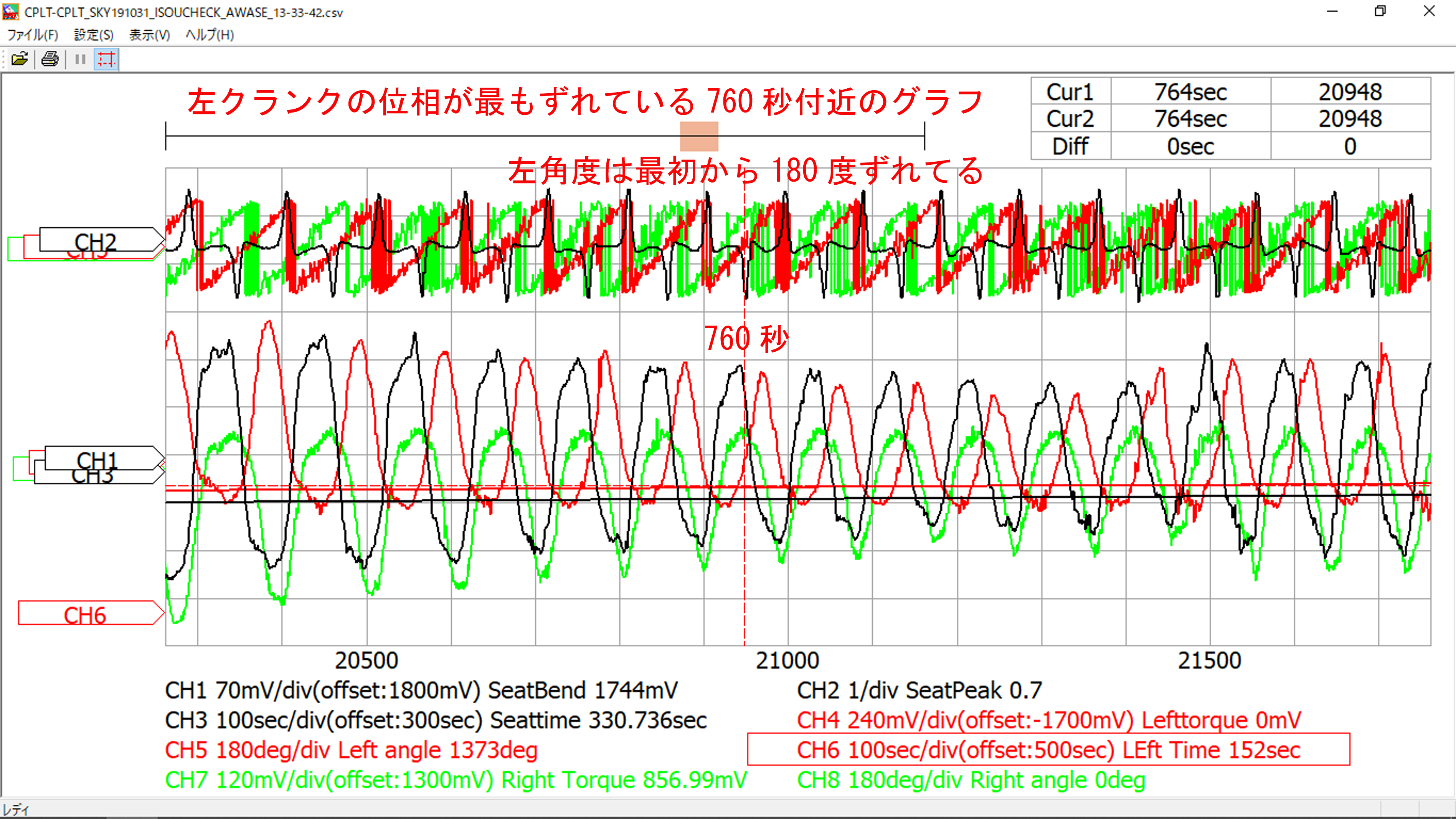
| ➁位相ずれの発生現象 | 左クランクトルク波形と左クランク角度との関係は一定になっているか?=>人間が踏んでいるので、トルクゼロ点は、ばらつくが、大きくずれることはないはずなので、ゼロ点でのトルク値の値ばらつきを測定、左クランクと右クランクの0度位置と180度位置でのトルクがゼロ付近になっているかをグラフで比較 | 下記グラフの結果 左クランクのトルクと角度の位相関係が大きくずれている箇所がある右クランクもSeatTube波形より少しずれている |
| ③今までと何ちがうのか4M変動 | 1MAN:自分 ミスは多い、踏み方がムラがある 2MACHINE:基板はFIX、受信はRASPIに大変更した 3MATERIAL:変更なし 4METHOD:ローラ台と自宅周辺、SKYPARKでは大きな衝撃振動発生があるが、ことなっている点が大きな違い |
1:操作をマニュアル化 1-A:踏み方を変えた場合どうなるかリアルタイムで観測する手段を作る 2:クランクマイコンで基準信号だしてRASPIで基準がでるか調査3:なし 4:ローラ台と振動が少ない路面で定常走行を繰り返してN増しで有意差を測定 =>管理できる振動衝撃を与えて信号への影響を測定する |
| ④クランク基板内での原因調査 | ④-1:タイムスタンプ値が時間精度が正確にでているか?=>IOにタイムスタンプ生成時の信号だしてオシロで測定 ④-2:IMUの角度値の乱れがLOOP時間へ影響があるのか?=> |
1:多分問題ないと思う 2:再現が難しそう |
| ⑤RASPI内でずれる可能性 | ⑤-1:タイムスタンプの時間順がぴたり合っているか
⑥リアルタイムでデータを表示できるかで、ログの遅れ方がPCよりはRASPIのほうが遅れる可能性があるが、データの精度には関係ない |
1:ぴったりあっている CH間のタイムスタンプ差も常に一定だから間違いない 2: |
| ⑥考察不足 | 上記チェック項目をすすめながら更に検討 |
●左クランク位相遅れ解析グラフ

①±2度位置(左上死点右下死点)でのトルク値の変化
踏み方でばらつくのが、上死点だ最大トルクはでないので大きなトルクがでたら位相ずれの影響とみられる

➁180度±2度範囲(左下死点、右上死点)でのトルク値
右はほぼ一定下死点

左760秒付近の実波形は

③考察
1)角度が右左ずれていく現象は踏み方の違いではで説明できない
2)この状態を再現しないと解決できない=>振動かノイズか何とかして再現する