改良基板と電池チェーンリングへ装着しました。
改良点1:タコ足配線を避けて、基板1枚に主要部品を搭載した。
改良点2:CPUをSTm32F103C8T6(Cortex M3 72MHz)にして処理速度をアップした
=>ATMEGA328P8MHzでは、115200bpsは無理だった
改良点3:Xbeeシリアル通信方式をHardWareフロー方式に変更した
=>CPLTはFLOW制御に対応してなくて、データ化けが頻発するので、使えなくなってしまいました。
改良点4:Xbeeの電源ノイズを大幅に減少させるために、モバイルバッテリー5Vダイレクトインにした。
改良点5:チェーンリングにセットしたらプログラム書き換えも電池交換もしないですべてクランク回りで処理できるように使い勝手を改善した。

●KXR94の角度調整作業
SeatTubeの上死点センサであるQMC5883Lと
右クランクの加速度センサKXR94の角度をあわせました。
①仕様確認
取説をまとめました。X+方向とは、重力加速度がプラスになる方向をさしてます。ですので、X+方向が真上だと1gが出力されます。

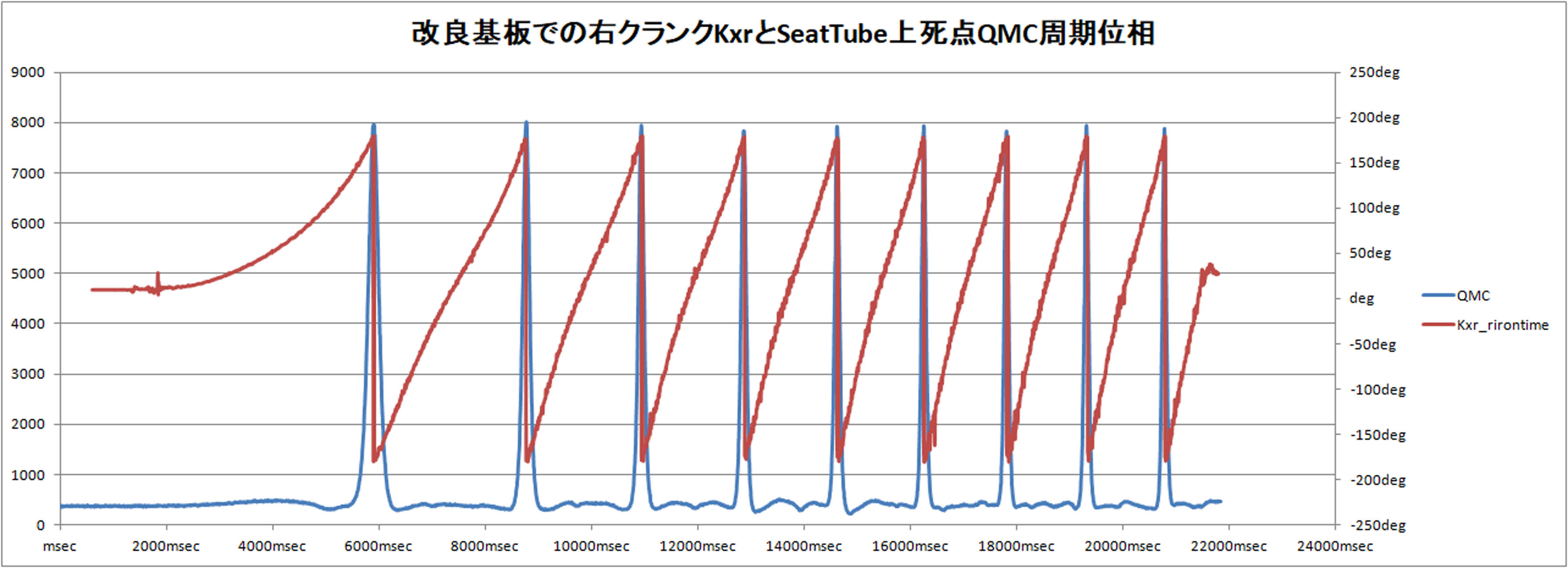
②上死点でQMCピークとKXR角度位置合わせ
±3度程度に合わせました。上死点位置を基準としてクランク角度をセンサを傾けて調整しました。

●手で回して、QMCとKXRの位相があうか確認
今までの旧基板の角度波形に比べノイズがなくきれいな波形がでてきます。しかも、QMCの上死点位置とぴったり合ってました。
①Xbeeのデータ落ち対策が効いた証拠です。データ落ちが無くなったのと周期精度がよくなった点が改良点です。
②加速度センサ波形はノイズが大きいので、10回の移動平均処理をいれてあります。これも高速CPUになったので可能になった処理です。

●以後
今週末は雨気味なので、SKYPARK走行試験は来週になるのでその間、ローラ台で、左右SeatTube同期実験を行っていきます。
時間が余ったら、左クランク基板もSTM32F103C8T6に変更したいです。