ようやく右クランクのトルクデータ無線受信できるようになりました。狭いクランクとチェーンリングに実装するのに基板システムが
大きすぎる課題は残ってますが。とりあえず、ローラ台で踏んでテストするくらいはできる程度まできました。
●基板製作
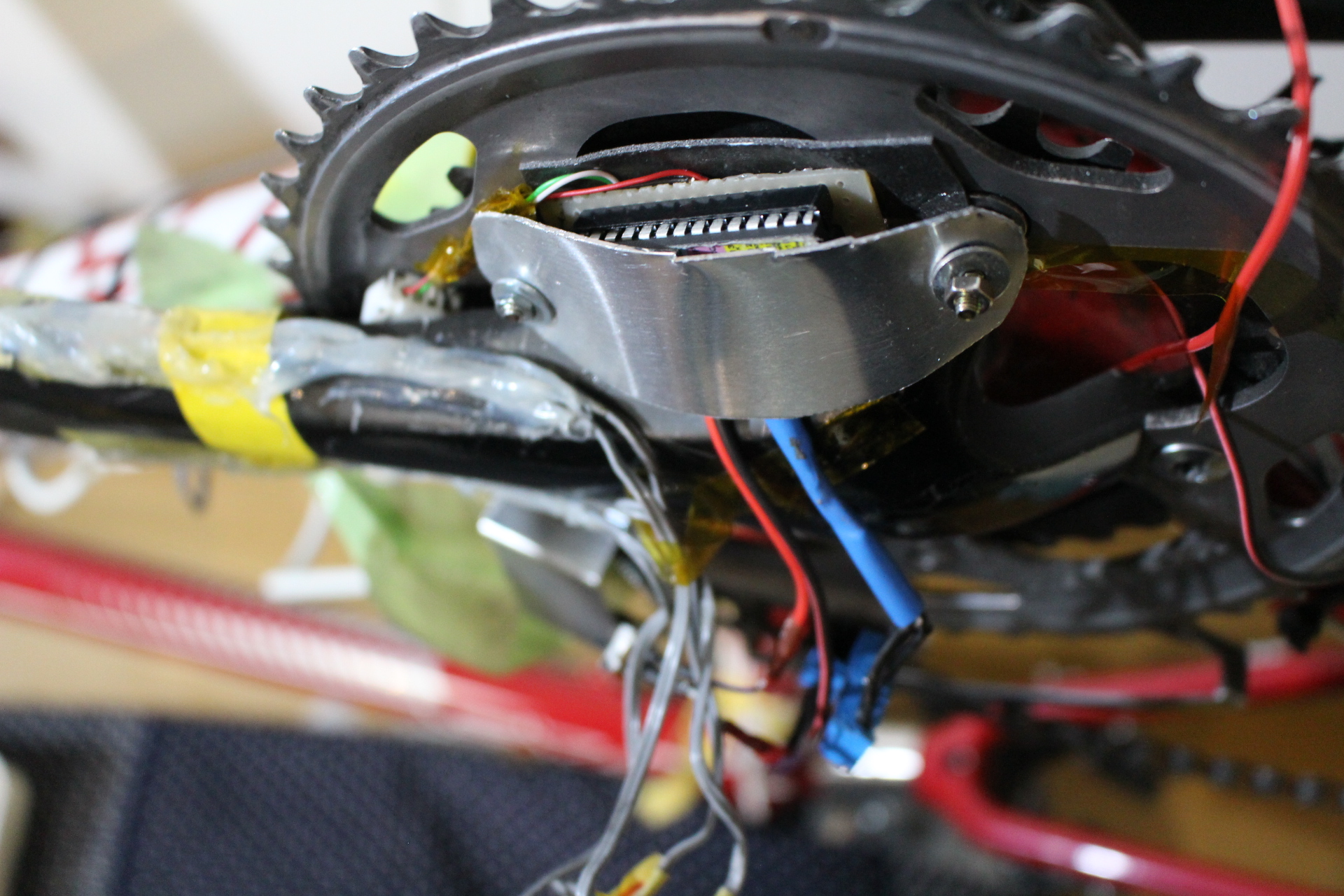
6月末の基板からSDカードスロットを省いて、さらに小型化を進めました。測定用なので、CPUとLT1167と3.3VDCDC昇圧は、外れるようにピンヘッダ差し込みにしました。

CPU基板とXbeeと電池が2か所と4か所に分散させて実装します。

●取付順
①電池をはめ込む
電池は、プラスとマイナスに太目の線がついているので、フレームにふれないように電池を固定してから線の長さを調整しました。


②CPU基板の位置決め
Xbeeのシールド線1本、ひずゲージ接続が4本、電源が2本
でているので、基板の良い位置が限られてます。

③Xbee固定

●動作確認
母艦プログラムは未だ、整備してないので
Cordinatorを母艦からはずして、Xbee用USBシリアルボードでPC接続してCPLTで、確認しました。
ATMEGA328PのArduinoのプログラマはシンプルなものです。115200bpsだと、通信エラーがでるので
Delayをprintln間に500μsecいれてようやく安定しました。
| int analogPin = 0; int torque = 0; int Time=0; void setup() { Serial.begin(115200); //シリアルの設定 }void loop() { torque = analogRead(analogPin); //入力ピンの読み取り Time=millis(); delayMicroseconds(500); Serial.print(torque); delayMicroseconds(500); Serial.print(‘,’); delayMicroseconds(500); Serial.println(Time); } |
これで時間を測定すると2-4msecでばらついてました。
やはり、8MHzの3.3V駆動だと処理速度に余裕はなさそうです。4CHでやる場合ATMEGA328Pでは、無理っぽいです。
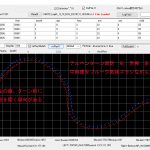
右クランクに手で荷重しながら、CPLTでデータをみると
横軸が1000dataなので、1目盛4秒です。
これを拡大して、1目盛り300msecでみると

300msecで半周期だとケイデンスだと100rpm相当ですが
波形は、ムラなくきれいにでてます。
●以後
ローラ台に乗せて、荷重をいろいろな水準でかけて
キャリブレーションして、クランクトルクの精度を測定します。