あと4日に迫ってますが、クワエルマウスの開発は、多くの課題にぶつかっていて訴求力が足りません、そこで、原点に戻って6軸力覚センサを利用して、クワエルマウスの課題を解析していくという開発プロセスのほうが訴求力があるだろうということにしました。
●ストーリー
クワエルマウスのWS機をイメージプロトタイプとして、デモは、手で操作するとこのくらい操作できるものが口クワエルとこうなってしまうという課題点を列挙して、そのために6軸力覚センサによる解析をこうやっていくので乞うご期待だというストーリーです。
●6軸力覚センサでクワエルマウスの解析意義
クワエルマウスの課題と6軸力覚センサによる解析を結びつけます。
| 課題 | 6軸力覚センサ解析 |
| 口でクワエル力を単独の分力に分解抽出できない | 解析A:6軸力覚センサに受力板を付けて、口で負荷する場合の6分力の出方を観察して6分力の出方の特徴を観察して、口でクワエル意識と分力の関係を解析 |
| 手で負荷するのと口でクワエル負荷では全く違う結果になる | 解析B:6軸力覚センサに受力板を付けて、手で負荷する場合と口でクワエル場合の6分力の出方を観察してどこが違うかを解析する |
| 受力板に貼るゴム材質と形状によって力の加わり方が全然違う | 解析C:6軸力覚センサの受力板へゴム材料を貼り付けて口でクワエテ分力の出方の差を観察して、材料の性質形状と分力の関係を解析 |
| クワエカタで初期ゼロレベルと分力の出方が変動するため毎回のTリセットが必要 | 解析D:
口でクワエル動作で変動しやすい分力を探す |
| ポインティングデバイとして制御するためのセンサ特性が判らない | 解析E:クワエル力の負荷モードの分力特性を観察してセンサとしてどうあるべきかを解析検討する |
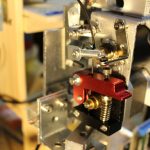
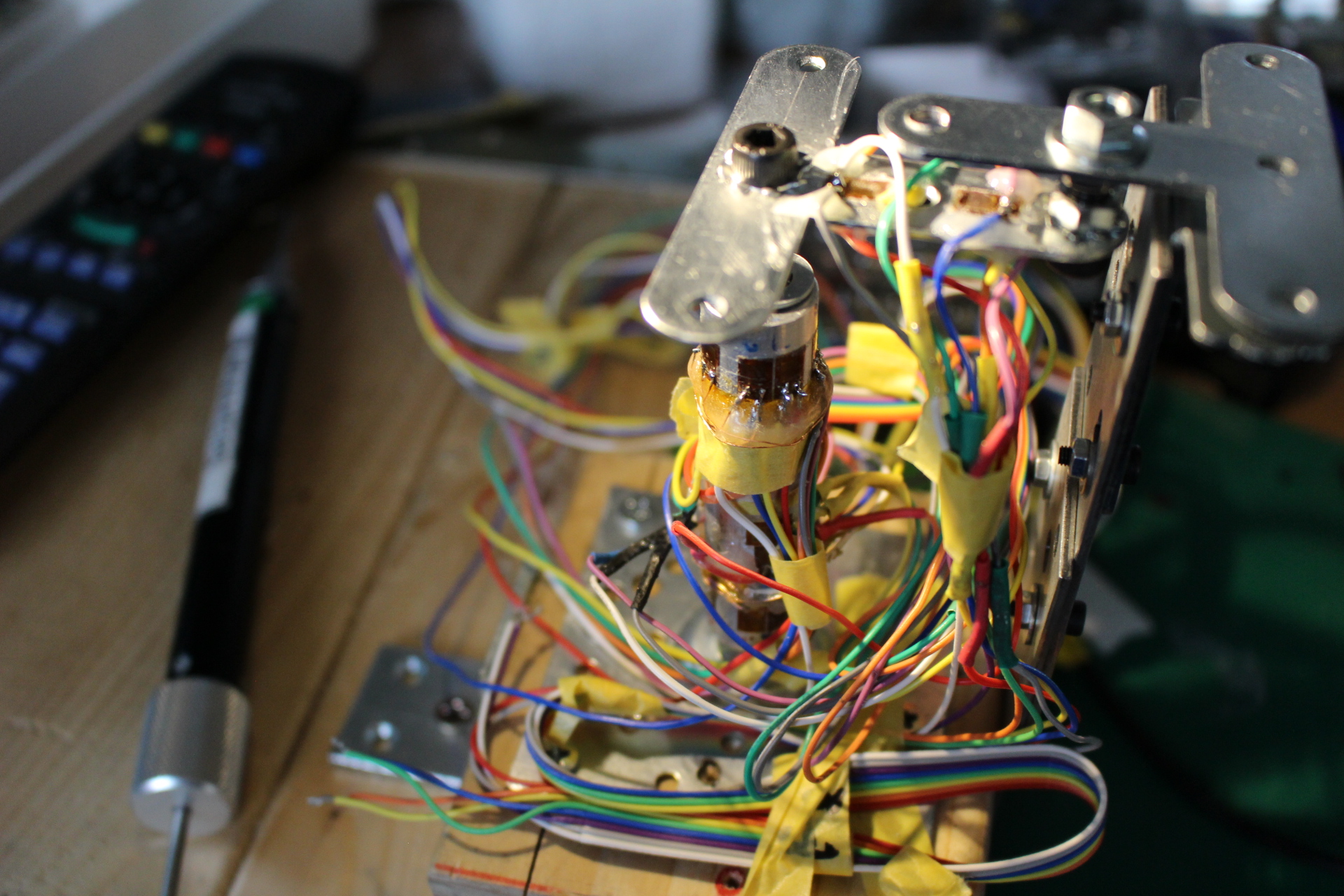
●6軸力覚センサ準備
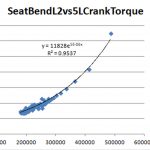
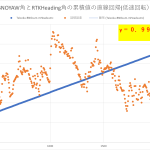
アルミ丸棒式の6軸力覚センサを使います。故障したと思っていたのですが、ドリフトを見たら治っていたので、たぶん、配線の接触抵抗がばらついたためと思います。Fzの精度的に問題があって使ってなかったのですが、±10%以内で分力の有無など傾向を観察する解析には使えると判断しました。


●解析検討資料
干渉補正するために、54水準の校正実験を行います。
1日でできると思います。

●以後
8日午前中までに、全部まとめて申請資料を作らないといけませんので、4日までに干渉補正して、5日、6日で解析A~Eを測定解析して、できるだけの結果をえます。6軸力覚センサを使ったことで新たな知見が得られることをMFT2019での成果とします。
動画は、WS機の手と口でのカーソル動作 6軸力覚センサでの手と口の分力発生状況などのリアルタイムグラフにします。
今年は、会場スペースがほぼ半減しているので競争率が高いのいで、万一落選してしまっても、どんどん開発は続けていきます。