昨年は3Dプリントのカーボンフィラメントで造形した6分力センサだったので、すべての精度が甘かったのですが、今年はアルミ丸棒で作ってあるので、ドリフトも少なく、高剛性で高荷重対応できてます。様子をみたところ相関係数がMxMyFzが0.998~0.999までの範囲に入っているので3DP版より一桁上の精度になりそうです。
昨年は、20gの錘で百g台で校正したのですが、今年は、BiteForceセンサなので、Kg単位の校正を行います。
※2021年5月追記
本記事は2019年時点での技術水準での内容ですが、2020年で多分力センサの校正技術が格段に進歩したため本記事は、役に立ちません、6分力センサの自作は10日くらいでできますが、校正作業で1週間、治具作りで1か月以上かかります。多分力センサの開発は、校正作業がネックなのです。その課題に対して、2020年夏から冬にかけてスマートキャリブレーションプローブ(SCP)という多分力校正システムを開発しました。これは、入力する校正荷重をあらかじめ精度が管理された多分力センサを経由して校正対象多分力センサに入力する方式です。これだと、管理されてない校正荷重ベクトルでも、分力をモニターしながら校正対象センサの出力と相関がとれるので、リアルタイムで多分力校正ができるシステムとなります。SCPシステムでは、指先負荷だけで10分で多分力センサの校正が完了します。手作業でやれば2~7日程度かかる作業ですので、劇的な改善ができてます。
SCPカテゴリーはこちらです。https://shinshu-makers.net/shinshu_makers/?cat=50
●高精度で、錘の1㎜ずれも見えてしまいます。
錘の載せ方のばらつきで、出力値がばらつくことがわかったので
錘位置でデータばらつきをみてみると1㎜以内に合わせないと
データがばらついてしまうことが判ってきました。
●錘の位置決め冶具を作った


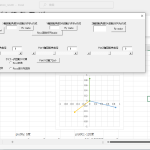
●校正用データをとってみた
750gの錘4個を載せて3kgfを載せてみました。
Myが発生するようにFz荷重をかけているのですが
Mxにクロストークが発生してました。ゲージ貼り精度が悪いのが原因だと思いますが、目で見えるクロストークなので干渉補正して消さないといけない方針となりました。

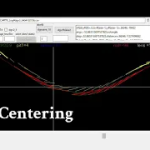
●干渉補正
昨年8月にMFT2018会場で狂った6分力センサを再補正して以来やってなかったのですが、干渉補正用のEXCELをもちだして
AD7194からデータ通信できるかみてみました。
VBAだと通信速度を遅くしないとダメで、10msecでは全然受信できませんでした。どんどん遅くして、120msecまで遅くしてようやく安定受信できました。
●干渉補正に必要な資料とVBAファイル備忘録
校正冶具を作ってから、データがきちんととれるようにして
干渉補正用データを測定して干渉補正式を計算します。
干渉補正についての記事は、

参考に今使っているexcelファイル