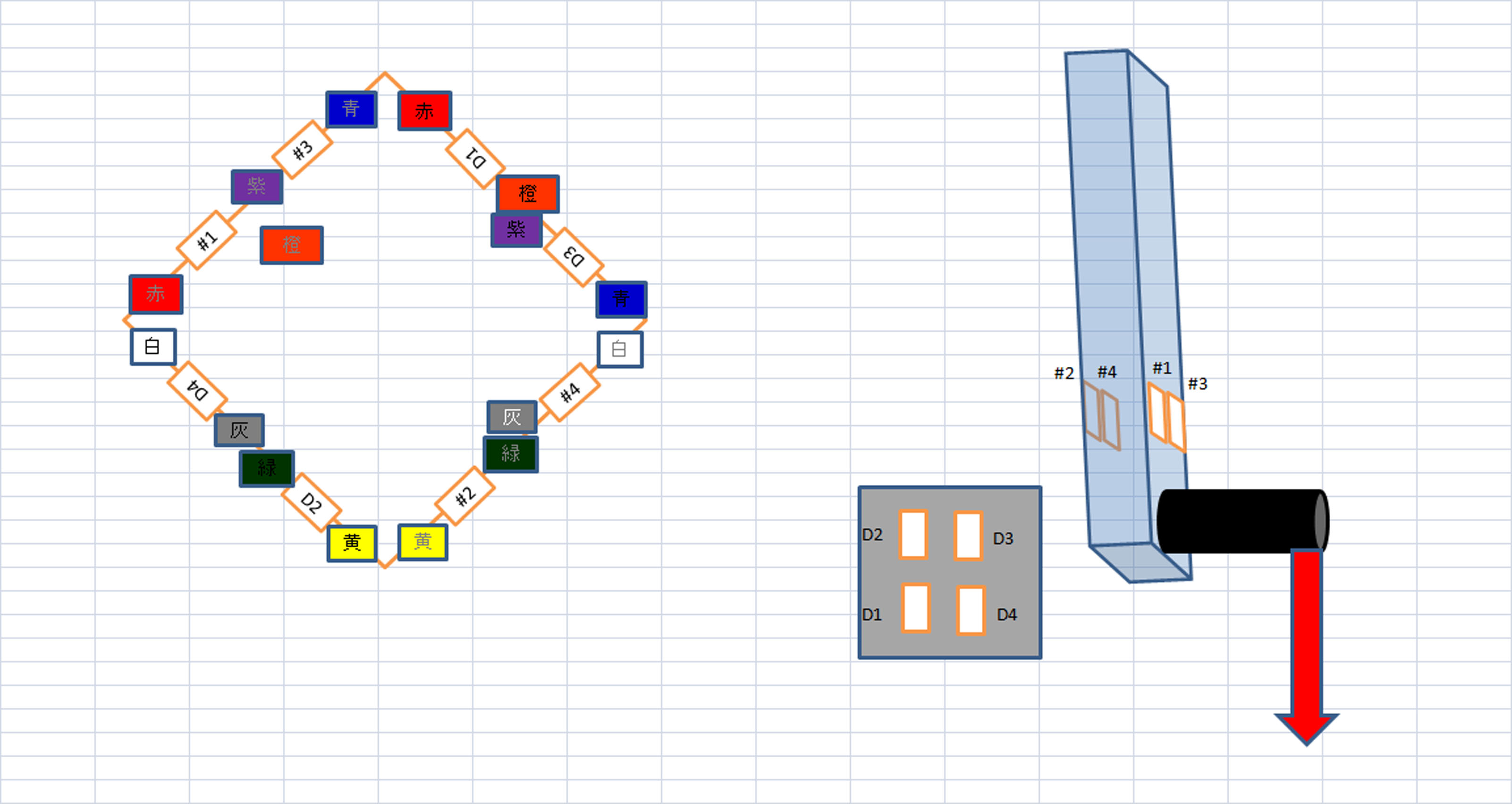
2ゲージ法で軸力がでたのはいいのですが、ゲインが小さいためアクティブ4ゲージダミー4ゲージでブリッジを組んでゲインを稼ぐ結線しました。

●複雑な結線をして通電してドリフトをみると

アルミ同士とは思えないほど大きなドリフトが発生してました。
ちょっとダミーに触るとびんびん変動するので、とてもCRANKに使えるものではありません。クロストークもでているには理屈に合いませんのですが、4ゲージのBENDでは大きなクロストークは発生してなかったので軸力アクティブ4ゲージxダミー4ゲージは、おかしいということで断念することにしました。
●CRANKのベクトルを干渉補正で得る
トルクだけなら比較的簡単に曲げブリッジだけで測定できるのですが、
軸力となるとCH数を増やして各種処理が必要なことが見えてきました。
3CH以上で干渉補正をいれることで昨年のペダリングモニターレベルで検討しなおすことにします。昨年のペダリングは、精度は悪いながらも一応踏力ベクトルは出てましたので、その精度を上げていくという方向で干渉補正をいれて、4分力センサーとしてのCRANKという扱いにしたいと思います。ですので、PMD2018の範囲から離れて6分力計にテーマとしてCRANKの分力測定を続けていこうと思います。CRANKのパワーメーター製品をみると片面にせん断と引っ張りのゲージを数CH配置してCPUで処理してます。多分、干渉補正をしないとトルクと軸力を得られないと思います。干渉補正をいれると精度的には1%未満は難しいと思います。
●以後
PMD2018で2CHだけで踏力ベクトルを測定する手段をいろいろ実験してきましたが
CRANK内の複雑な応力分布でクロストークが邪魔をしてなかなか2CHでは難しいことが判ってきました。今週中で終わらせる日程でしたが無理なのでテーマを6分力計の2019にいれて、対象が異形物のアルミCRANKとしてそれの4分力計を作るというテーマに変更して、3Ch以上で干渉補正ありという条件で来春まで延長していこうと思います。その中でCRANKに納まる回路も検討していきます。