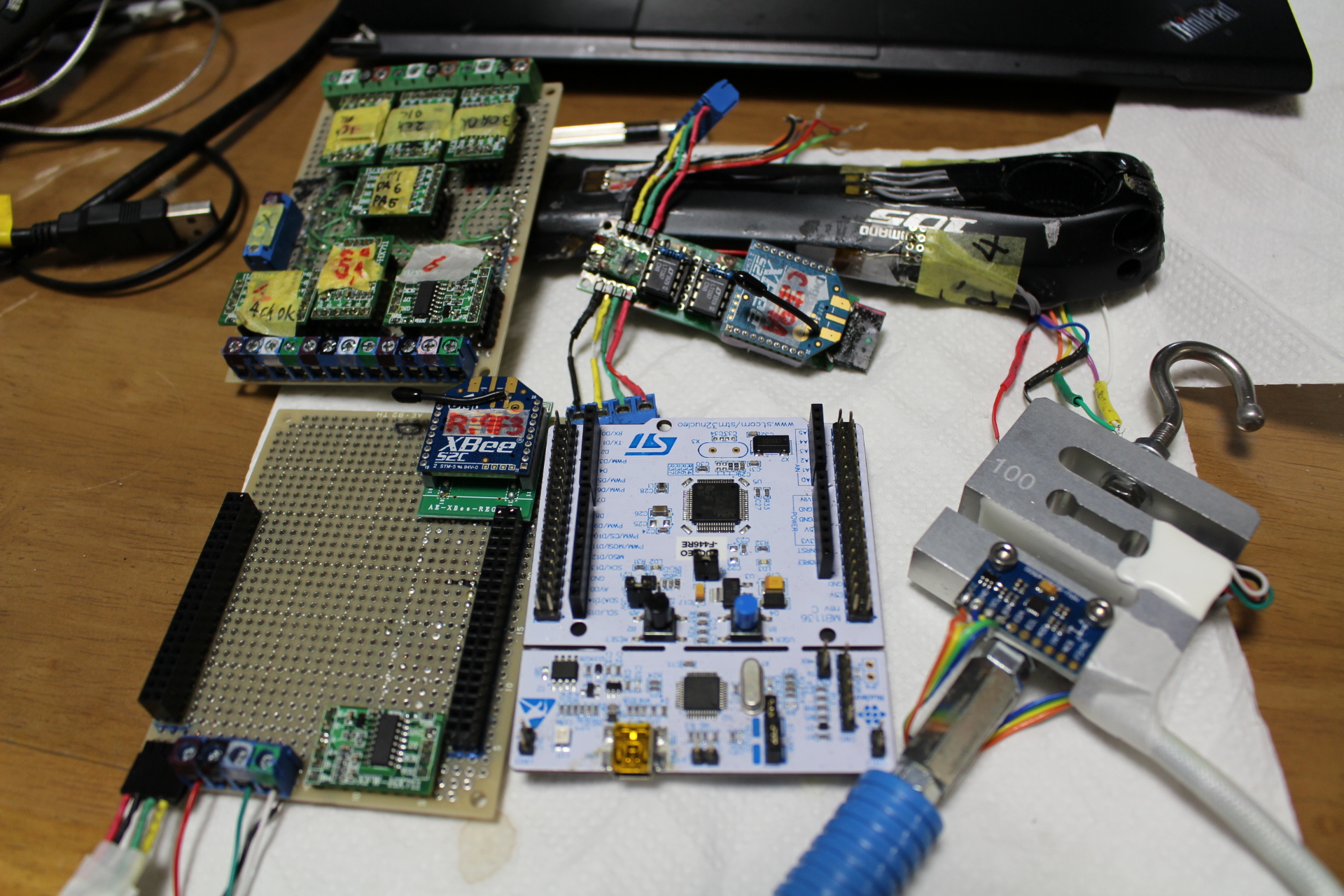
クランク用Xbee基板の通電テストOKとなって、シリコン充填剤を塗布して完成となりました。

LT1167のゲインRG抵抗は、差し替えできるようになってますが、とりあえず100Ωの抵抗をさしてあります。

●クランクのベクトル力をキャリブレーションするために作った
i-Tensionの基板と通電テストもOKとなりました。

●動作テストプログラム
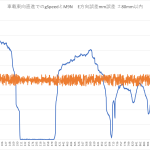
秋月のS字ロードセル圧縮方向が出力がでなくて、オーバーフローになってしまいました。中華ロードセルだとそうはならないのですが、E+とE-の抵抗がゼロΩになってして何か回路が普通のロードセルと違っている感じがします。
NUCLEO F446REのプログラムは下記です。
IMUはMPU6050 or 9020にしました。(LSM9DS1より余っているので)
| #include “mbed.h” #include “HX711.h” #include “MPU6050.h” #define pi 3.141592 MPU6050 mpu;int16_t ax, ay, az; int16_t gx, gy, gz; //DigitalOut gpo(D0); //DigitalOut led(LED2); HX711 scale1(PA_6,PA_5);//(DATA,CLOCK) HX711 scale2(PA_8,PA_7);//(DATA,CLOCK) HX711 scale3(PA_10,PA_9);//(DATA,CLOCK)[ HX711 scale4(PB_4,PB_3);//(DATA,CLOCK) HX711 scale5(PB_2,PB_1);//(DATA,CLOCK) HX711 scale6(PA_12,PA_11);//(DATA,CLOCK) //HX711 scale7(PB_14,PB_13);//(DATA,CLOCK) HX711 scale8(PC_2,PC_3);//(DATA,CLOCK) //AnalogIn scaleRaw(A3); Timer timec; Serial pc(USBTX, USBRX); // USB Serial Terminal float calibration_factor = 1000; //-7050 worked for my 440lb max scale setup mpu.initialize(); bool mpu6050TestResult = mpu.testConnection(); timec.start(); float weight1 =scale1.getGram(); pc.printf(“%4.0f,%4.0f,%4.0f,%4.0f\n\r”,weight8,ang_yx,ang_yz,ang_zx); } |
●以後
明日以降、i-Tensionのベクトル力校正してから、クランクのベクトルがでるか実験していきます。