校正ペダルはペダル面に垂直方向の1分力しか測定してません。
実際のペダリングを再現する目的ではなく、力のベクトル方向は
ペダルを傾けることでクランクに入力させます。
ここで注意が必要なの、ペダル面内方向に力が発生するとモニターしてないのでノイズになります、できるだけ足から面内方向力が発生しないように踏む必要がります。
ということで、本日は、足の可動範囲を測定してみました。
可動範囲は、日本整形外科学会等資料がたくさんありました。
http://www.geocities.jp/brain_hemi/Souki/Koushuku/ROM/ROM_3_kashi.html


つまさきを上に曲げることを伸展と呼ぶらしく20度まげられるそうです、つま先立ちする方向を屈曲と呼ぶそうで、45度まで曲げられるそうです。
そこで、私のペダリング中の足の可動範囲を測定して、踏力ベクトルの可動角範囲を調べてみました。膝の角度は測ってませんが
あとで、まとめて測ってみます。
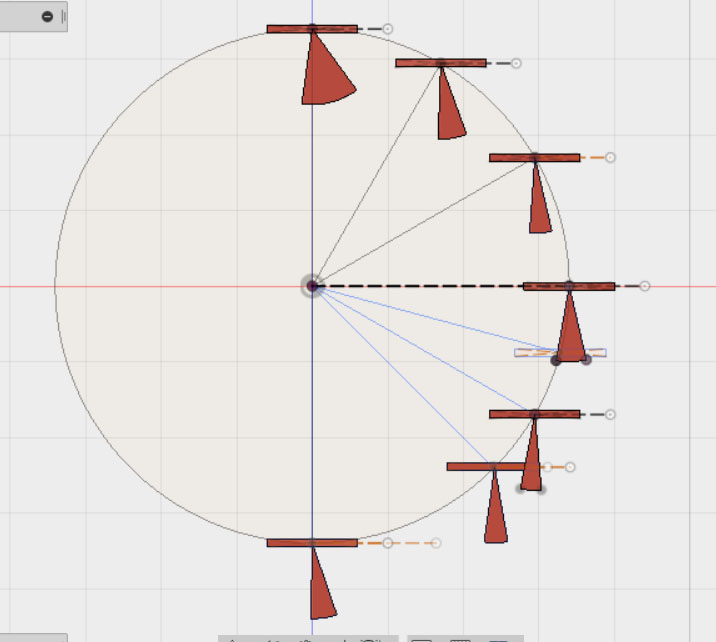
●角度測定

ぱっと見た感じ 狭い範囲で主に鉛直下踏みに近い範囲であることが分かりました。あくまでも私の足の場合ですので、
みなさんの場合は、違うと思います。目的は、踏力ベクトルの
角度をふって、ひずみゲージとトルク(接線力)の校正です。
●以後
上記データを図面とグラフにして、これだけの範囲で踏力が振れたときの接線力との誤差に対して補正をどうするのかを検討していきます。
※2018年11月に記事再生をおこなっておりますが2017年5月当時の技術では、踏力ベクトルをペダル踏み力から得ようとしてましたがこれは失敗に終わりました。2017年11月にクランクに16枚ゲージを貼ってペダリングモニタを試作しましたが、それでようやくペダリングの踏力ベクトルを得ることができるようになりました。