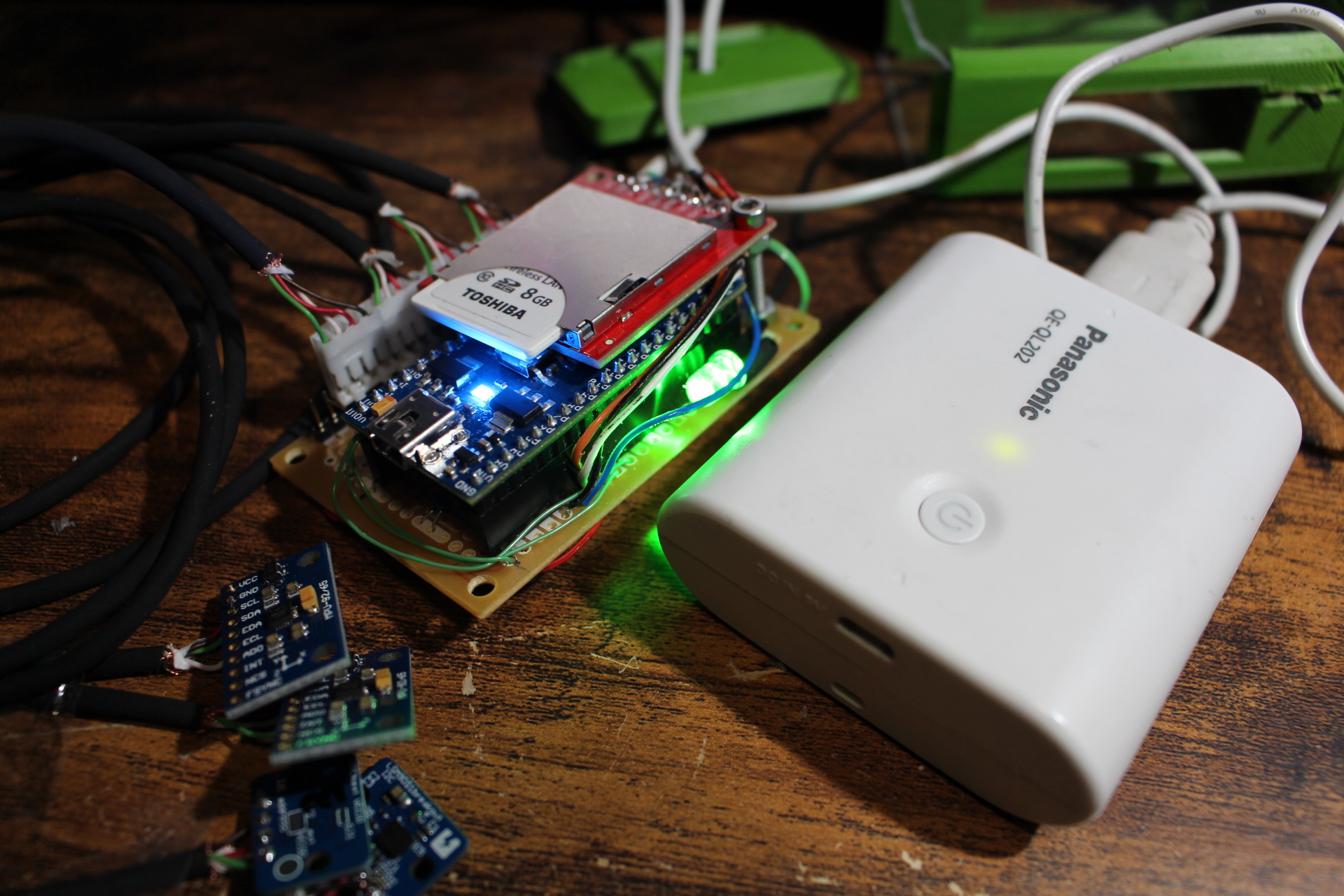
3Dプリンタフィラメント、到着待ちですが、残りの2,3,4CH目のセンサー配線して、プログラムを追加して、足につけて動かしてみました。
2CHで処理時間、2倍の18msecになりました。4CHでは、36msecになるので、データ精度的に厳しいかもしれません。

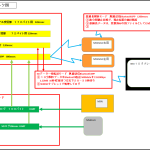
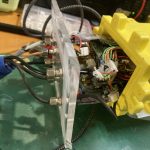
IMUセンサを4CHとりつけられるようにしたので、ロボットケーブルでケース内があふれてしまって、サイズオーバーになったので、ケースを再度プリントし直します。
●2CHで様子見
①手首にセンサを貼って、前腕を鉛直ー水平動作させた

90度くらい回しているつもりですが、実際は30度くらいでしょうか。
腕の動きだと不正確なので、治具で動かしたほうが正確になりそうです。加速度とComplementaryがずれてるのがきになります。
②両膝の上にセンサを貼って、膝の屈伸運動

これは、ずれが少ないですが、加速度波形が汚いです。
③テレマーク姿勢のデータおかしい

これはなんだかわかりません、確実にいえるのは加速データが飛んでしまってグラフにできません。②の屈伸にたいして、前進成分がはいりながら回転するので、加速が飛んでしまってるのかもしれません。
頼りになる軸方向がないとテレマーク姿勢の曲げ角度ゲットできませんので、基本姿勢を解析して、あるべき姿を考えてみます。