Zwiftほぼ毎日1時間踏んでるのですが、坂道にかかってから負荷がかかるまで5秒くらいかかります。坂道が終わって平坦に戻る時は速く移動します。
機構がどうなっているか、カバーだけ開けてみました。

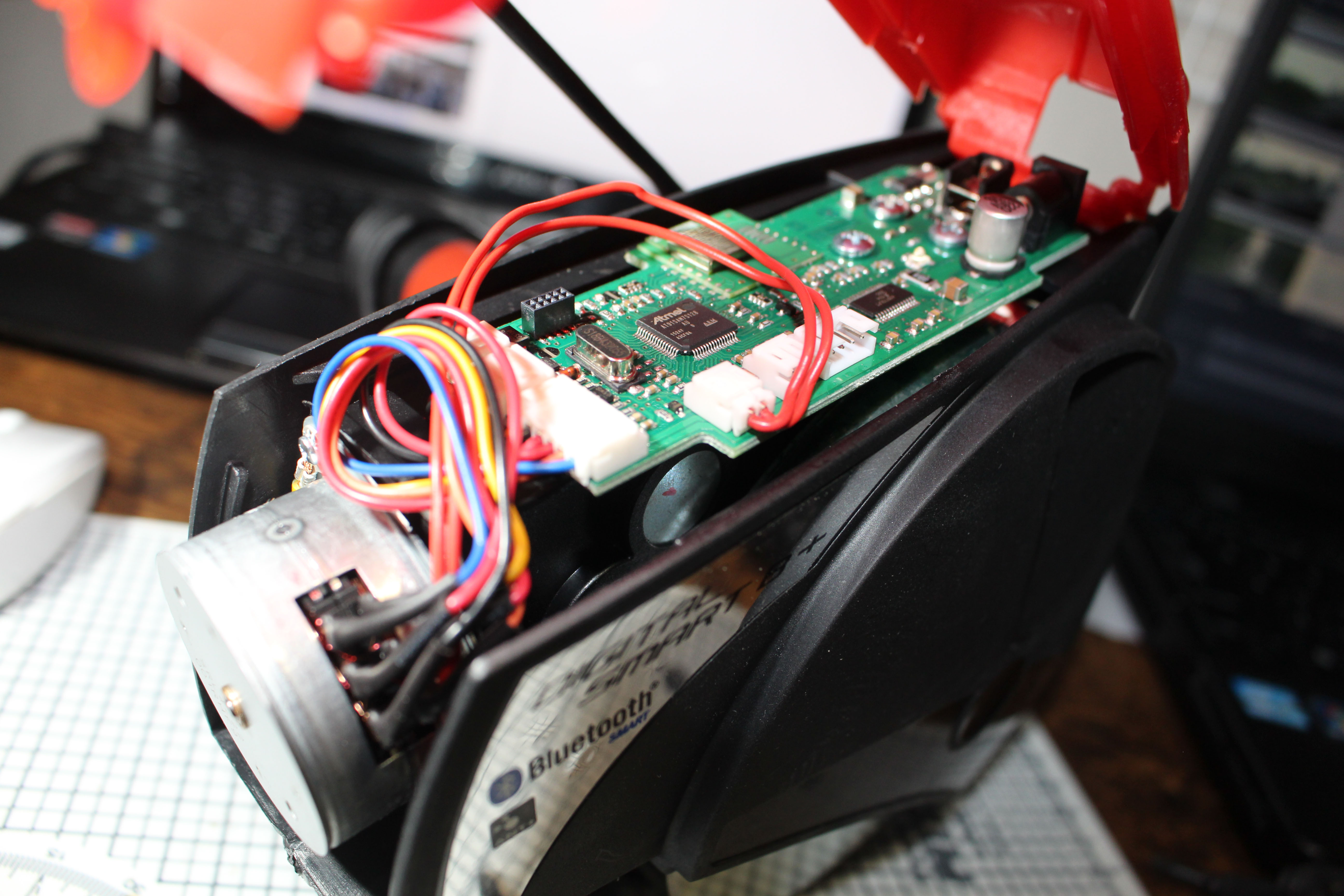
ネジをはずすと、上の赤いカバー部分がヒンジになっていて左から右へ開きます。

モータは、PM型ステップモーターで軸がリードスクリューになってます。

ステップモーターなので、6本の線がでていて、コネクタにまとまってます。モーターの動きをモニターするならこのコネクタを中継する線を作ってオシロなどで見れば、何ステップ回転したかわかります。

磁気ブレーキの磁石は2個使いでした。下位機種は、1個でしたので
2個にしてブレーキ力を上げたのでしょう。しかし、これでも6%勾配程度です。モーター軸リードスクリューの真鍮が見えます。PM型のステップモーターなのでトルクも回転数も上がりませんので、坂道にかかった時も5秒もかかって磁石を40ミリ程度移動しているのではないかと思います。ハイブリッドPMを使えばもっと速くなるのですが、ドライバと回路で電源容量が上がるのでコストアップでできなかったのだと思います。
しかし、Eliteのローラ台安くつくってありますね。多分仕切り値は相当安いんだと思います。製造原価は、1万以下だと思います。

磁気吸引力が強力(10kgfとか)あるので、アルミダイキャストフレームで支えられてました。磁石を運ぶキャリッジは樹脂成型品でした。


基板のネジをはずして下部をみると、ドラムに水車状のフィンがついていてフィンを感知するとセンサーがありました。これでエンコーダとして回転を詳細にカウントしてます。
Eliteの解説では、ケイデンスセンサなくてもケイデンスが把握できるとしてますが、このエンコーダーで後輪の回転むらを拾ってペダリングの周期を演算しているんだと思います。
●Hackの検討
①パルスモーターのコネクタを中継してmbedのGPIOに突っ込んで
mbedからパルスモーターの制御をモニターしてZwiftからの信号指示で負荷がどのようにくわえられるのかがモニターできます。
②ANT+の信号をとれればZwiftからの信号を解析できるのですが
BLEで目一杯なので、これはしばらくはできません。
③モーターを追加して、下り坂、追い風などで加速に使うとか
競り合いになったときモーターを回して、ダッシュするとかずるい使い方もできますが、Zwiftコースを全部まともに走るのは大変ですので補助モーターがあれば私には丁度いいかもしれません。